

爱游戏体育app官网入口(中国)有限公司
-
地址:广东省深圳市宝安区福海街道塘尾富源工业区A1栋一楼东
手机:13826540336
-
咨询热线
0755-27908296
主动隔振系统的历史发展及应用(一)
发布时间:2022.07.15 阅读量:1515
本篇文章将为大家讲解主动隔振系统是如何工作的,应用领域,以及有什么限制。由于主动隔振系统在半导体制造业的大量应用,因此得到了特别的关注。
【主动隔振系统的历史发展】
反馈控制系统已经存在了几百年,但是在20世纪有了最大的发展。在第二次世界大战期间,这项技术被用于防御系统,取得了非常迅速的进展。如今这些发展仍在继续,即使在今天很多地方也在使用反馈控制系统,例如战斗机控制系统和导弹制导系统。
主动隔振系统是用于国防的机电控制系统的扩展,早在20世纪50年代,主动隔振系统就被开发用于直升机座椅等应用。因此,主动控制系统专门用于振动控制已经存在了60多年。在精密振动控制行业,主动隔振系统已经有近20年的历史,它们在广泛使用方面进展缓慢的原因有很多。主动隔振系统比被动隔振系统相对更复杂,成本更高,但是,主动隔振系统拥有被动隔振系统无法实现的功能。
近年来,有两件事引起了人们对主动振动控制系统的兴趣。首先是半导体行业的快速增长,其次是生产更多、更快、成本更低的半导体产品的需求。
光刻和检测过程通常包括将硅片放置在一个沉重和/或快速移动的平台上,从而相对于关键的光学(或其他)元件来定位硅片。当这些阶段在晶圆片上从一个位置扫描到另一个位置时,它们会导致整个仪器在隔振系统上“弹跳”。
尽管在这样的移动之后,仪器的运动可能很小(几毫米),但仪器的分辨率正在接近,在某些情况下甚至在1纳米以下。具有这种分辨率的仪器不可避免地对最小的振动级别都很敏感,即使是轻微的振动,这种分辨率的仪器也容易受到影响,在这种情况下,主动隔振系统通过隔离有效载荷在此类阶段运动发生后的残余运动来隔离振动。
第二个使主动隔振系统更受欢迎的变化是数字信号处理技术的进步。一般来说,基于模拟电子学的有源系统会比基于数字的系统表现更好。这是因为高性能模拟电子具有固有的低噪声和带宽。(相对便宜的运算放大器可以有30位的等效分辨率和许多兆赫的“采样率”。)模拟电子产品也很便宜。模拟系统的问题是,它们必须手动调整,不能(容易)处理非线性反馈或前馈应用。
数字控制器有潜力自动调整自己和处理非线性反馈和前馈算法。这使得有源系统更容易用于OEM应用程序(例如半导体行业)。它们还可以被编程来执行各种任务,根据命令在任务之间自动切换,还可以进行软件升级,无需举起烙铁就能“重新连接”反馈系统。
【伺服系统和术语】
尽管主动隔振系统的术语相当通用,但也有一些变化,所有主动控制系统的基础如下图所示。
它包含三个基本要素:
1)标记为“G”的块称为装置,它代表在应用任何反馈之前你的机械(或电子、液压、热等)系统的行为。它表示一个传递函数,即块的输出与输入之比,表示为频率的函数。这个比率同时有大小和相位,可能是也可能不是无单位的。例如,它可以表示一个振动传递函数,其中输入(左边的线)表示地面运动,输出(右边的线)表示桌面运动。
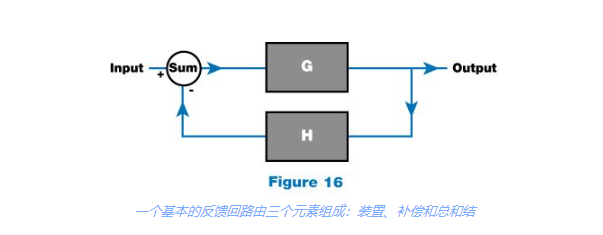
一个基本的反馈回路由三个元素组成:装置、补偿和总和结
2)在这种情况下,比值是无单位的。如果输入是一个力,输出是一个位置,则传递函数的单位为(m/N)。G的传递函数有一个特殊的名称:被控对象的传递函数。所有传递函数(G、H、乘积GH等)都用复数(实部和虚部同时存在的数)表示。在任意给定频率上,一个复数表示复平面上的一个向量。矢量的长度和角度表示传递函数的大小和相位。
3)标记为“H”的块称为补偿,通常表示伺服。对于隔振系统,它可能代表一个传感器的总传递函数,监测工厂的输出(加速度计),一些电子过滤器,放大器,最后,制动器产生一个力作用在有效载荷。在这个例子中,响应的大小、相位和单位为(N/m)。注意,系统的循环传递函数,即乘积(GH),必须是无单位的。在控制系统的性能和稳定性分析中,回路传递函数是最重要的量,我们将在后面讨论。
4)圆是一个求和结。它可以有许多输入,这些输入全部加起来形成一个输出。所有的输入和输出都有相同的单位(比如力)。每个输入的旁边都打印一个加号或减号,以表示是加还是减。请注意,H的输出总是在这个结处减去,表示负反馈的概念。累加结的输出有时被称为电路中的误差信号或误差点。
可以表明,系统的闭环传递函数如方程16所示。这也许是控制理论中最重要的关系。分母1+GH称为特征方程,因为其根在复平面的位置决定了系统的稳定性。从这个方程的形式中,还可以立即看出其他几个性质。
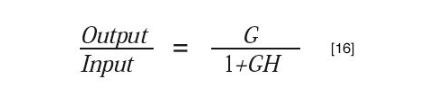
首先,当环路增益(幅度|GH|)远小于1时,闭环传递函数仅为分子(G),对于大环路增益(|GH|>>1),传递函数被环路增益降低或抑制。因此,当闭环增益大于单位增益时,伺服系统对系统的影响最大。单位增益频率或单位增益点之间的频率跨度是伺服系统的主动带宽。
在实践中,你不允许使环路增益在统一增益点之间任意高,仍然有一个稳定的伺服。事实上,在单位增益频率附近增益增加的速度是有限制的。因此,系统的环路增益通常受到可用带宽的限制。
方程16的另一个明显结果是,只有当|GH|方程1的幅值和相位接近180度时,闭环传递函数才会变大。当量GH接近这一点时,其值接近(-1),方程16的分母变小,闭环响应变大。在单位增益频率下,GH与180度的相位之差称为相位裕度。相位裕度越大,单位增益点处的放大率越低。
然而,结果表明,较大的相位裕度也会降低伺服器在其有源带宽内的增益。因此,选择相位裕度是在增益和稳定之间的妥协在统一增益点。相位裕度小于60度时,总是会发生单位增益的放大。大多数伺服器被设计有一个在20度和40度之间的相位裕度。在伺服单位增益频率的放大出现在系统中就像新的共振。
